It is a pleasure to announce the invited talk by Snehal Bhayani, currently pursuing his doctoral studies from Center for Machine Vision and Signal Analysis at University of Oulu. Mr. Bhayani has recently published his work on minimal solvers at CVPR 2020 and is going to talk about it during the session. Please, find the details below:
Title: A Sparse Resultant Based Method for Efficient Minimal Solvers
Time: 1015 hrs, 7-September-2020
Room: CV Colloq
Paper: [CVF] [Arxiv]
Abstract:
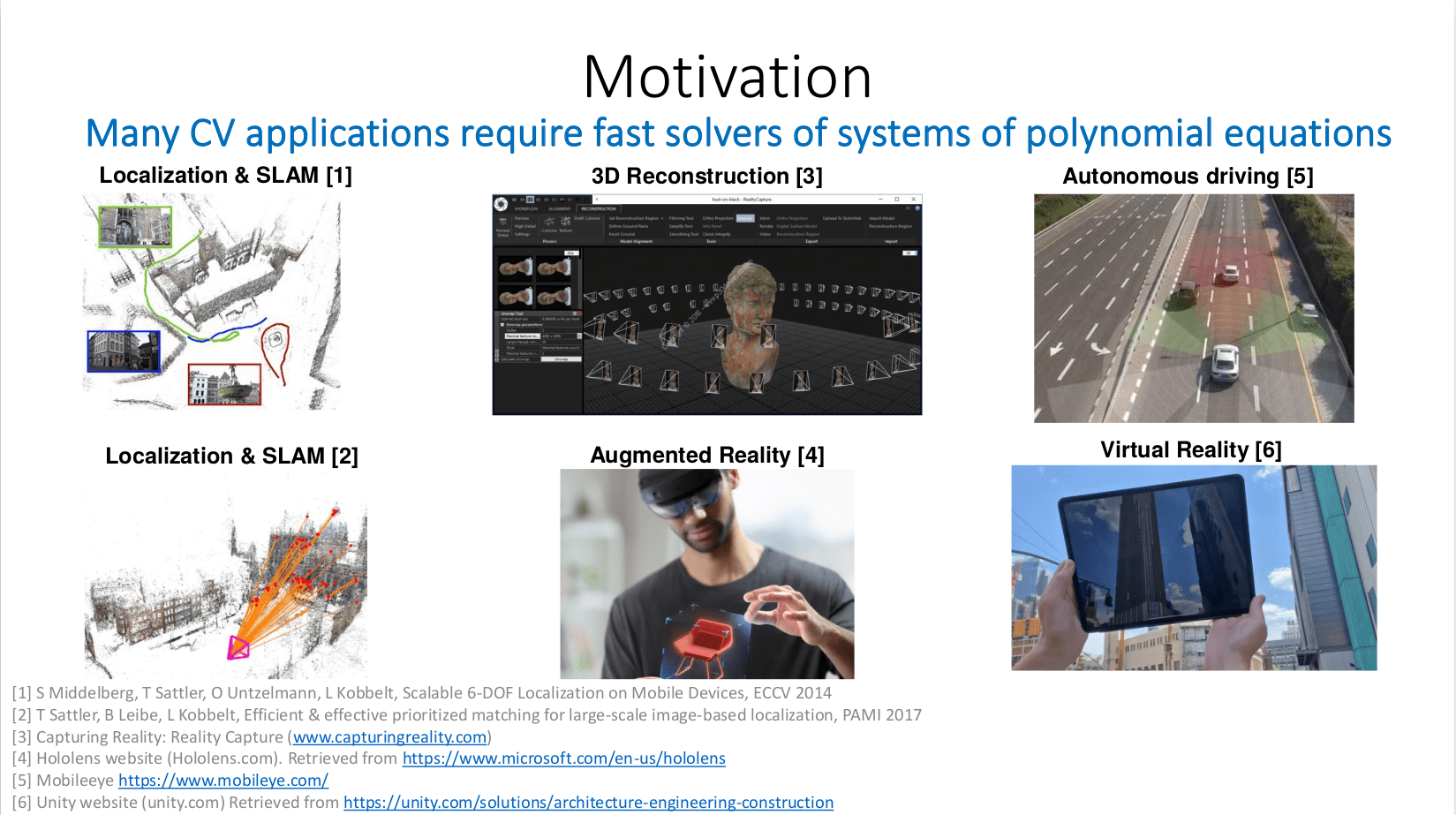
The content of the talk has applications with algorithms in Computer Vision where one needs to solve camera geometry, usually as a part of RANSAC-like loops. So the applications can be reconstruction, augmented reality, camera calibration, structure from motion, etc. The idea is to model geometry problems by using minimum amount of information. Many computer algebra software can be used to solve such problems accurately and efficiently. Solving such problems is usually divided into two stages, Offline and Online. Offline stage involves the more time consuming operations that are executed once per type of problem, e.g. relative pose (stereo) for calibrated cameras can be solved from 5-point correspondences. Our approach compares against the S.O.T.A. in terms of speed and accuracy. The underlying tools are inspired from algebraic geometry.